

谁也没想到,开年刚刚掀起的“智驾平权”浪潮,这两天却因为一起交通事故,被狠狠地泼了一盆冷水。
3月29日晚,一辆小米SU7标准版在德上高速公路池祁段遭遇严重事故,以97km/h的速度撞上了水泥护栏并发生爆燃,车上3人不幸遇难。最关键的是,在事故发生前,这辆小米SU7正处于NOA领航辅助状态,以116km/h的车速持续行驶。一时间,智能驾驶的安全性问题再次被推上了风口浪尖。
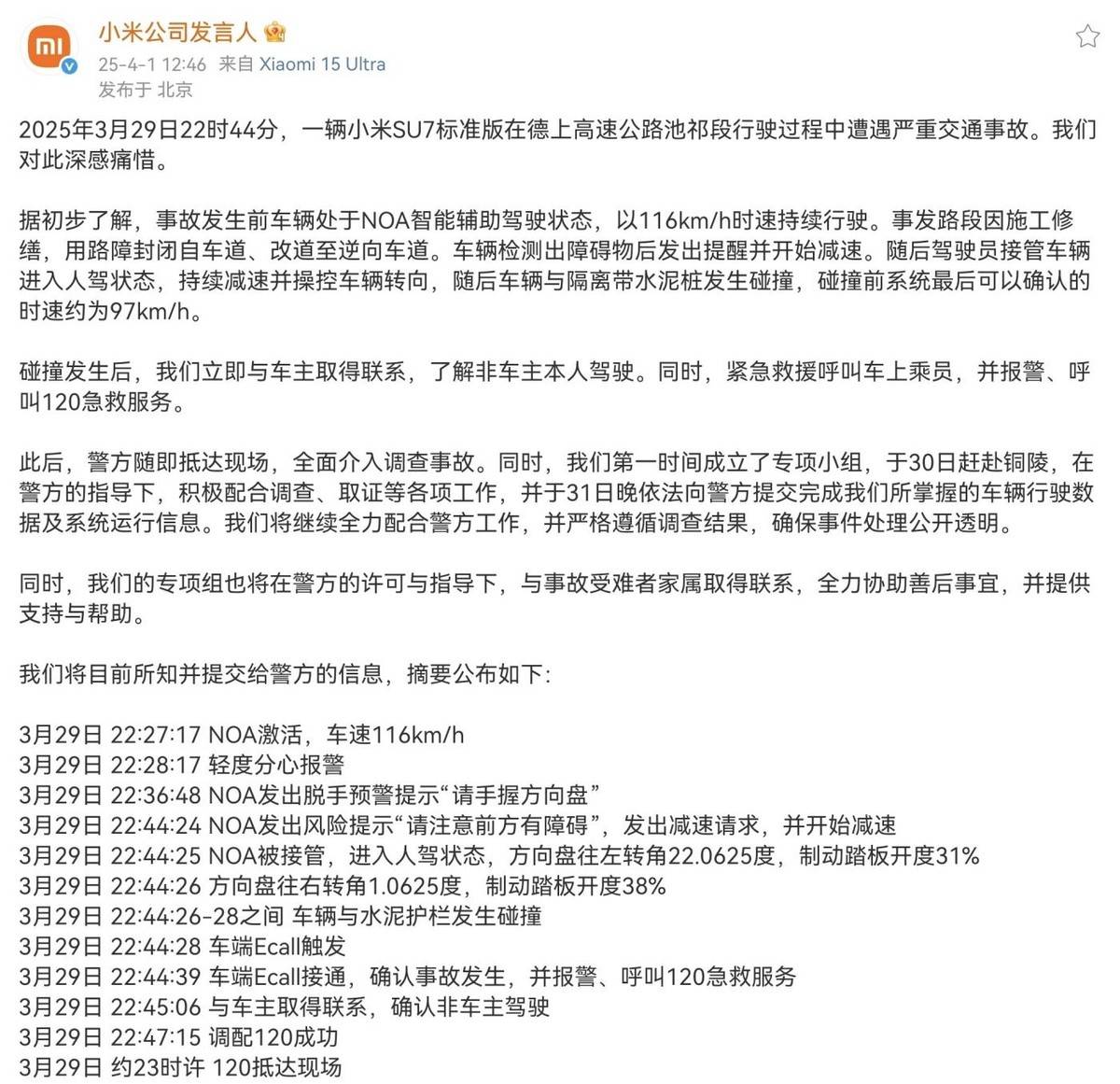
根据小米汽车给出的行驶数据显示,虽然在碰撞发生前,智驾系统发现了障碍并做出预警,同时进行了减速动作,但给驾驶人的反应时间只有短短的2秒钟。问题来了,为什么小米SU7智驾系统直到最后一刻才发现危险?速度明明在AEB工作范围内(8-135km/h),AEB为何没有激活?
对此,小米汽车在最新的公告中给出了答复,该功能目前不响应锥桶、水马、石头、动物等障碍物。说白了,就是不识别。那肯定有人又要说了,宣传吹上天,出事儿才承认识别不了。先别急,不识别还真不完全是小米的锅。
识别局限是通病
想弄清AEB自动紧急刹车系统为什么不启动,首先要知道它的工作原理。简单来说,AEB的激活需要经过感知、决策、执行三个步骤。首先系统要通过雷达、摄像头等感知硬件监测前方的道路环境信息,识别障碍物。如果存在障碍,系统将会基于车辆与障碍之间的距离,或碰撞所需时间来评估碰撞风险,如果判定系统设定的某个安全阈值时,便会触发紧急制动。在这一整套运行流程中,感知无疑是最为重要的一环。恰恰就是这一环,有一个整个行业都无法避免的通病——传感器感知局限。

AEB感知硬件上,最常见的是毫米波雷达和摄像头的融合感知,只是这两种传感器都有比较明显的性能局限。毫米波雷达可以精确测算车辆与障碍物的相对速度、距离和角度,探测距离也较远,但是并不能看出障碍物具体是啥。摄像头虽然可以直观清晰地识别环境、行人、车辆或其他障碍,但也更容易受天气、光照等因素影响。
而且在面对新泽西护栏、水泥墩、水马、锥桶等形状不规则的静态物体,或前车掉落的物品零件、闯入高速的小动物,以及儿童、蹲着的人等低矮事物时,感知系统也普遍存在不能及时识别或识别不到的情况。这次小米SU7事故,就是吃了标准版纯视觉感知性能局限+夜间光照不足+无法识别不规则障碍物的亏。

对此,车企简单可以分两种技术路线。一方面,是升级纯视觉方案,比如小鹏MONA M03的AI鹰眼视觉感知系统,就采用了双目摄像头+毫米波雷达的组合。其中双目摄像头相比传统单目摄像头,不仅拥有更好的识别精度、环境适应性,还具备距离、深度的感知能力,结合毫米波雷达,可带来更多安全冗余。再比如比亚迪的天神之眼C智驾系统,目前已经用上了三目摄像头融合感知,进一步提升了对障碍物的识别能力。当然,特斯拉是一个例外,FSD仍然完全依赖视觉摄像头进行感知。不过凭借先进的HW4.0硬件平台和端到端神经网络,FSD同样具备可靠的感知性能和决策执行能力。
另一方面,就是以华为、理想、蔚来等为代表的激光雷达融合感知方案。激光雷达尽管成本较高,且不能避免雨雪沙尘等极端天气的干扰,但更远的探测距离、厘米级的测距精度可以有效弥补摄像头和毫米波雷达的缺陷,构筑更完善的感知系统。
像华为最新的ADS 3.3的立体融合感知系统,就搭载了1个192线激光雷达、3个高精度固态激光雷达、3个分布式4D毫米波雷达矩阵、2个4D毫米波角雷达、12个超声波雷达+11个高清摄像头组成。激光雷达最远探测距离可达200米,3颗激光雷达协同作用可覆盖300度感知范围,几乎可以实现对周围环境的360度无死角感知。加上数据积累、算法训练,已经可以比较准确地识别水马、锥桶等不异形障碍物。并且AEB的工作范围,在ADS 3.3上也被提升到了时速150km/h。

不过,即便做到这个地步,目前也没有人敢断言可以保证100%的障碍识别准确率,毕竟现实的交通环境要比训练场景复杂得多。此前3.15曝光的小鹏G6与逆行三轮车的严重碰撞事故,其实就已经暴露这一问题。事故车之所以没触发AEB,随车手册写得非常明白,AEB无法对逆向车辆起作用。
宁可不刹,不能错刹
那么假如已经过了感知这一关,AEB是不是就可以触发启动了呢?还真不一定。
很多人都会存在一个误区,就是把触发AEB当作车辆规避风险的必然结果。然而事实上,AEB的触发需要考虑很多因素。首先就是前面提到的车速,小米SU7的AEB工作范围是8-135km/h,华为升级到ADS 3.3后AEB是4-150km/h,理想的是5-120km/h。超过这些范围,AEB是肯定不会触发的。
不过这些135km/h、150km/h的速度都是极限工况,只能看作安全冗余,并不代表在这一范围内AEB就一定没问题。厂家在标定系统执行策略时,还要考虑当前的速度触发AEB,是否会引发其他风险。在高速行驶中如果突然急刹车,不仅可能会导致后车追尾,在湿滑路面上甚至还可能造成自身出现失控风险。
与此同时,避免误触发也是AEB系统需要考量的重点。在去年,理想就发生过一起错把广告牌中的车辆识别成前车,突然急刹导致后车追尾的事故。再把时间线往前倒,特斯拉有过类似的情况。如果行人或车辆稍微离近一点,或者有一些其他细小的风吹草动,就要触发AEB的话,反而会产生一些不安全的因素,还可能惊吓到车内的乘员,影响驾乘体验。因此,很多厂商都会采用较保守的AEB标定策略,就比如小鹏。
去年媒体小鹏华为AEB之争,小鹏汽车在夜间、雾天等场景的AEB媒体实测中频频翻车,有一部分原因就在于标定偏保守,一切以防误杀为前提。相反的,华为就表现出了更激进的标定策略,在各种场景下基本都能做到及时刹停。当然,这也是得益于华为在硬件和算法上的优势,对于误触发的优化比较到位。
除此之外,AEB的触发还有一个非常重要的原则,就是不能有人为干预。当系统判定车辆与障碍物之间的距离,超过了系统标定的安全阈值,且在发出警告后发现驾驶员仍未采取有效的避险措施时,那么AEB便会触发来规避事故。但如果系统监测到驾驶员接管了车辆,并做出制动或转向动作时,那么AEB就不会触发介入,干扰人为操作。
回头来看此次的小米SU7事故,在事故发生的前2秒,车辆的NOA智能辅助驾驶退出,进入人驾状态,并做出了左右转向和制动动作。这种情况,完全符合AEB不会触发的条件之一。
写在最后
归根结底,如今的智能驾驶只是L2级的自动辅助驾驶,而不是自动驾驶。AEB也只是一种主动安全措施,而非绝对的救命稻草。作为车主,我们应该理性地看待和使用智能驾驶,驾驶员始终都是驾驶安全的第一责任人,不能盲目将自己的生命交给这些“遥遥领先”的科技。作为车企,或许也应该反思,我们是不是过于追求营销而忽视了对消费者的教育。只有更加明确当前智能驾驶的能力边界,避免那些绝对化的营销话术,让消费者对智能驾驶有更清晰的认知,才能避免更多悲剧的发生。

推荐
19.58万起即享百万级超品质,阿尔法S6/T6上市六大含金量一文说清
车圈薛可奈
电气系统执行标准远超国标,岚图汽车电磁辐射仅为手机一半
车圈薛可奈
极狐阿尔法新6系上市,诚意如何?
四轮部落
把钱准备好 多款合资新车来袭 MAZDA EZ-60领衔
鬼斗车
从流量到销量,MG品牌3月销量同比暴增
汽车焦点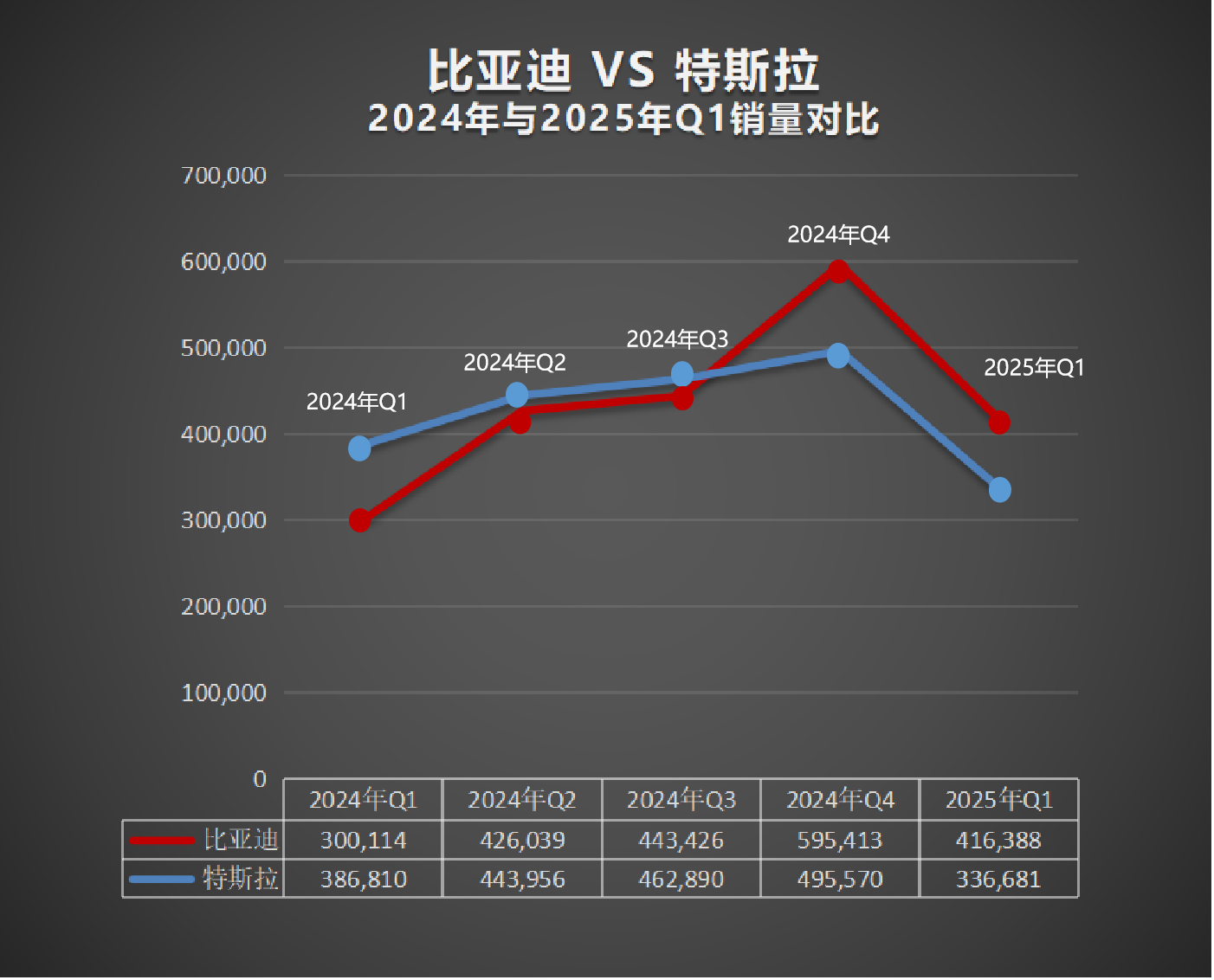
再次超越特斯拉 比亚迪成为2025年一季度纯电全球销冠
汽车大观「 爱车空间 」大众汽车品牌将进一步升级其全新中国DNA
爱车空间
艾铁成兑现承诺,正式离职,但乐道的病因不在他身上!
DearAuto
宝马3系50周年限量版官图,珍惜吧,下代就换脸
车动态
广汽本田P7即将上市,轴距超2米9,最大续航650km零百加速4.6秒
李特儿
红旗品牌智能体验日来了,高能不断,满满干货
汽车商评
17.98万元起!25款狮铂拓界上市,都市SUV开拓者再焕新
汽车商评评论
暂无评论,抢占沙发




